Pour mesurer un point de déport d’inclinaison horizontale
Lors de l’utilisation d’un récepteur GNSS ayant la compensation d’inclinaison IMU activée et un IMU correctement aligné, vous pouvez utiliser la méthode Déport d’inclinaison horizontale pour mesurer les emplacements qui ne peuvent pas être occupés par la pointe de la canne, par exemple lors de la mesure du centre d’un arbre ou d’un mât.
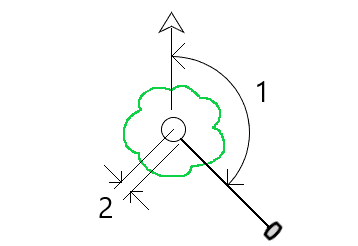
La méthode Déport d’inclinaison horizontal utilise la compensation d’inclinaison IMU pour calculer l’azimut de la canne inclinée entre le Centre de phase de l’antenne (APC) du récepteur GNSS et la pointe de la canne, et puis projette le réciproque de l’azimut (1) en avant de la pointe à la distance de déport spécifiée (2) pour calculer le point de déport :
- Appuyez sur
 et sélectionnez Mesurer / Mesurer points, ou dans la carte, avec rien sélectionné, appuyez sur Mesurer.
et sélectionnez Mesurer / Mesurer points, ou dans la carte, avec rien sélectionné, appuyez sur Mesurer. - Dans le champ Méthode , sélectionnez Déport incl. Hz.
-
Entrez leNom du point et Code.
Si le code sélectionné a des attributs, la touche programmable Attrib s'affiche. Appuyez sur Attrib et remplissez les champs d’attribut. Voir Pour entrer des valeurs d’attribut lors de la mesure d'un point. Appuyez sur Stocker.
- Entrez une valeur dans le champ Hauteur d'antenne et assurez‑vous que les paramètres dans le champ Mesuré à soient configurés de façon appropriée.
-
Entrez une valeur dans le champ Déport.
C’est la distance à partir de la pointe de la canne jusqu’au point décalé à mesurer. Le déport est représenté sur la Carte par une flèche à partir de l’icône de position de la pointe.
Normalement la canne est inclinée vers vous – dans ce cas vous entrerez une valeur positive. Si vous devez incliner la canne loin de vous, entrez une valeur négative.
-
Alignez l’IMU afin que la compensation d’inclinaison IMU soit active, et puis positionnez la pointe de la canne à la position source pour le déport et appuyez sur Mesurer.
-
Inclinez la canne de plus de 15° et visez vers le bas de la canne à l’azimut requis au point de déport.
La flèche de déport sur la Carte est rouge lorsque l’inclinaison est inférieure à 15°. La flèche de déport devient jaune lorsque l’inclinaison est supérieure à 15° et que l’azimut devient utilisable. Lors de la mesure la barre d’état affiche
 . Vous devez maintenir la pointe de la canne immobile pendant la mesure, mais vous pouvez déplacer le récepteur GNSS pour viser vers le bas de la canne afin que le centre du récepteur, le centre de la canne, la pointe de la canne, et le point de déport mesurés (par exemple, le centre de l’arbre) se trouvent dans une ligne droite (sur le même azimut). L’azimut au moment du stockage des points est l’azimut utilisé pour le déport.
. Vous devez maintenir la pointe de la canne immobile pendant la mesure, mais vous pouvez déplacer le récepteur GNSS pour viser vers le bas de la canne afin que le centre du récepteur, le centre de la canne, la pointe de la canne, et le point de déport mesurés (par exemple, le centre de l’arbre) se trouvent dans une ligne droite (sur le même azimut). L’azimut au moment du stockage des points est l’azimut utilisé pour le déport. -
Lorsque le temps d'occupation et les précisions prédéfinis sont obtenus, appuyez sur Stocker.
Si Stocker pt auto est activé le point est stocké automatiquement après les conditions prédéfinies sont remplies.
-
Stocker pt auto utilise les options de précision, de temps et de nombre de mesures que vous avez définies pour les points topo. Vous devez vous assurer que vous ayez pointé dans l’azimut correct avant de répondre aux critères de stockage automatique des points. Si vous utilisez Stocker pt auto, Trimble vous recommande de viser l’azimut correctement avant d’appuyer sur Mesurer.
-
Auto-mesurer commence lorsque la pointe de la canne devient immobile. Vous pouvez déplacer l’antenne pour viser l’azimut vers le déport tout en mantenant la pointe immobile. Trimble vous recommande de ne pas utiliser Stocker auto et Auto-mesurer ensemble car il se peut qu’il n’y ait pas suffisamment de temps pour viser l’azimut décalé. Si vous utilisez le mode automatique complet, il se peut que vous deviez prolonger le temps de mesure afin de convenir.
-
Les déports verticaux ne sont pas disponibles avec la fonction Déport incl. Hz. Le déport d’inclinaison horizontal est horizontal uniquement ; le résultat du déport calculé est à la même élévation que la mesure du point de pointe source.
-
La visée dans l’azimut est la plus grande source d’erreur lors de l’utilisation de cette fonction. Pour obtenir l’azimut correct, il faut aligner le centre de la canne au point de déport. Par exemple, à un angle d’inclinaison de 25° et une longueur de vecteur de déport de 1,000 m, la différence en azimut entre l’utilisation d’un côté de la canne pour viser l’azimut et l’autre côté de la canne est d’environ trois degrés, ce qui signifie que les deux résultats de déport sont distants d’environ 5 cm. Si une méthode de déport plus précise est requise, utilisez l’une des méthodes de déport pour calculer le point, telle que Depuis une ligne de base.
-
Le compteur d’occupation ne comptera pas si la canne se trouve dans 15° de niveau. C’est du fait qu’une quantité significative d’inclinaison est requise pour un bon azimut entre l’APC du récepteur GNSS et la pointe de la canne d'être déterminé et visé par l’opérateur.
-
Afin d’assurer que les noms de point des points de la pointe de la canne de déport d’inclinaison Hz soient uniques, les noms de point sont générés automatiquement à partir de l’heure GPS, préfixés de HTO_ indiquant le déport d’inclinaison horizontale.
-
Les points de déport d’inclinaison horizontale sont stockés sous forme d’un relèvement et une distance (polaire) dans le fichier d’étude. Pour afficher l’azimut et la distance entrés, changez le champ Affichage coord. dans l’écran Options à Comme stocké.
-
Les points (pointe de la canne) sources stockés avec des points de déport d’inclinaison horizontale sont de classe construction et par défaut ceux-ci n’apparaissent pas dans la Carte. Pour les afficher dans la carte, changez les paramètres de filtre de carte. Voir Filtrage des données par type de mesure.
